Ir al contenido
Quiénes somos
Productos
Servicios
Blog
Contactos
Quiénes somos
Productos
Servicios
Blog
Contactos
Buscar
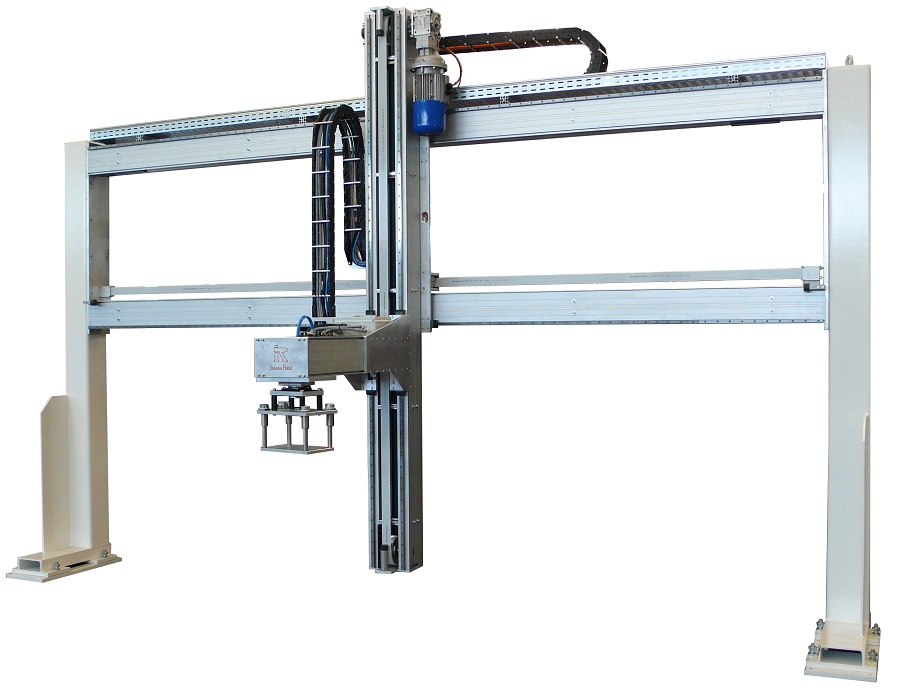
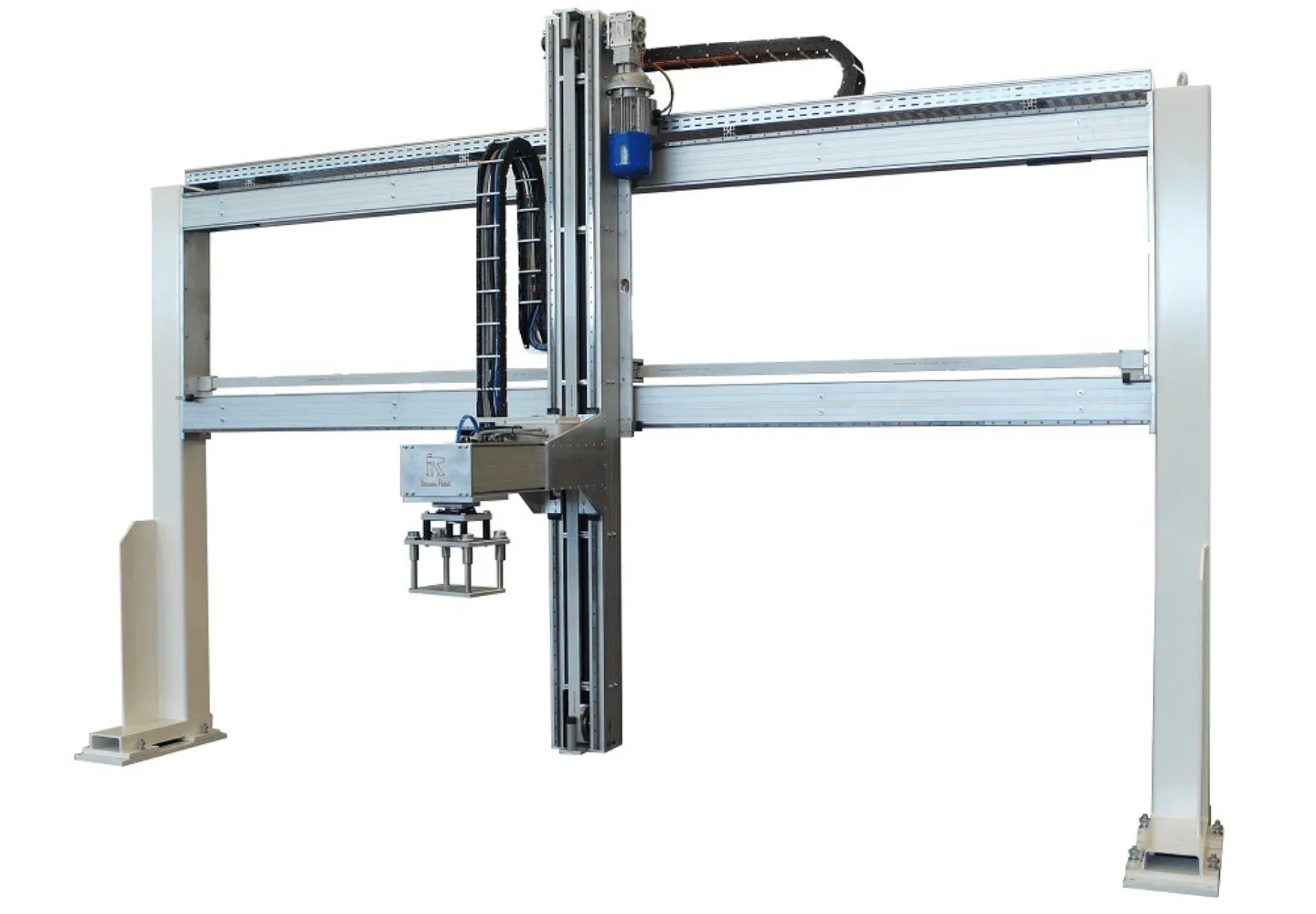
Robot de prueba para sistemas de agarre con Venturi

{kind=link}
{kind=link}