Skip to content
About us
Products
Services
Blog
Contacts
About us
Products
Services
Blog
Contacts
Search
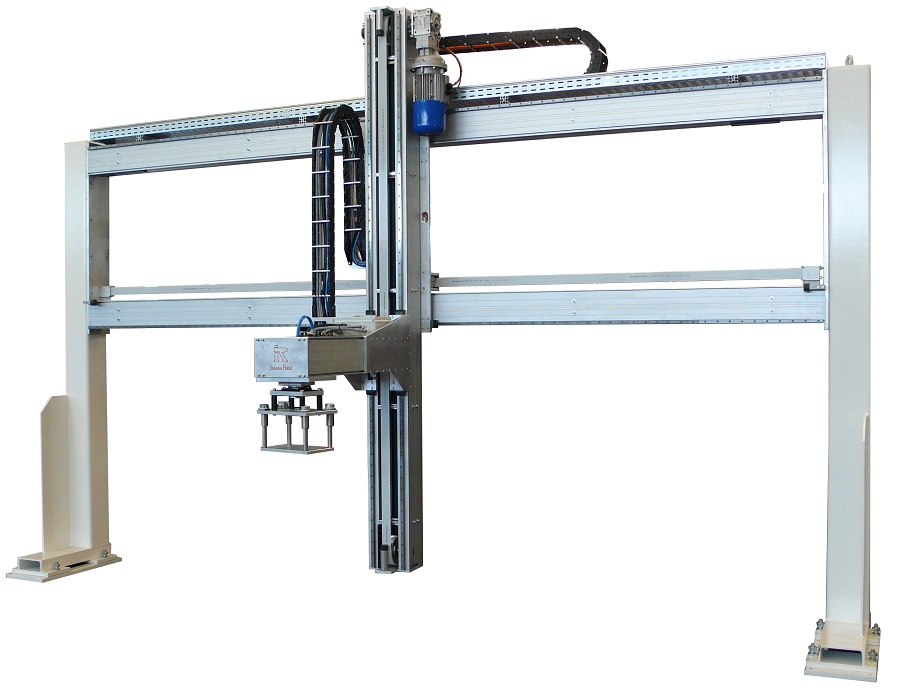
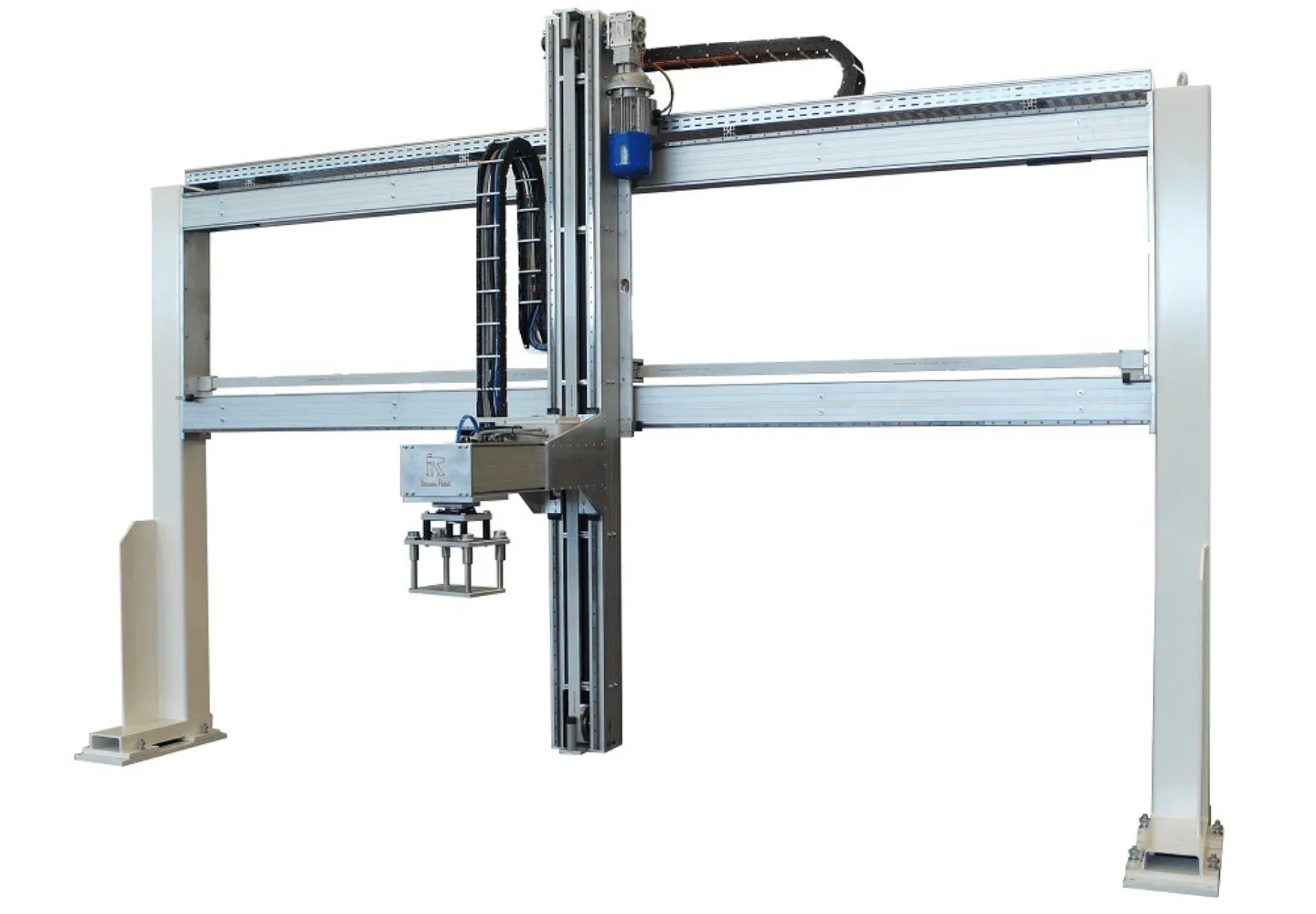
Test robot for Venturi-based gripping systems

{kind=link}
{kind=link}