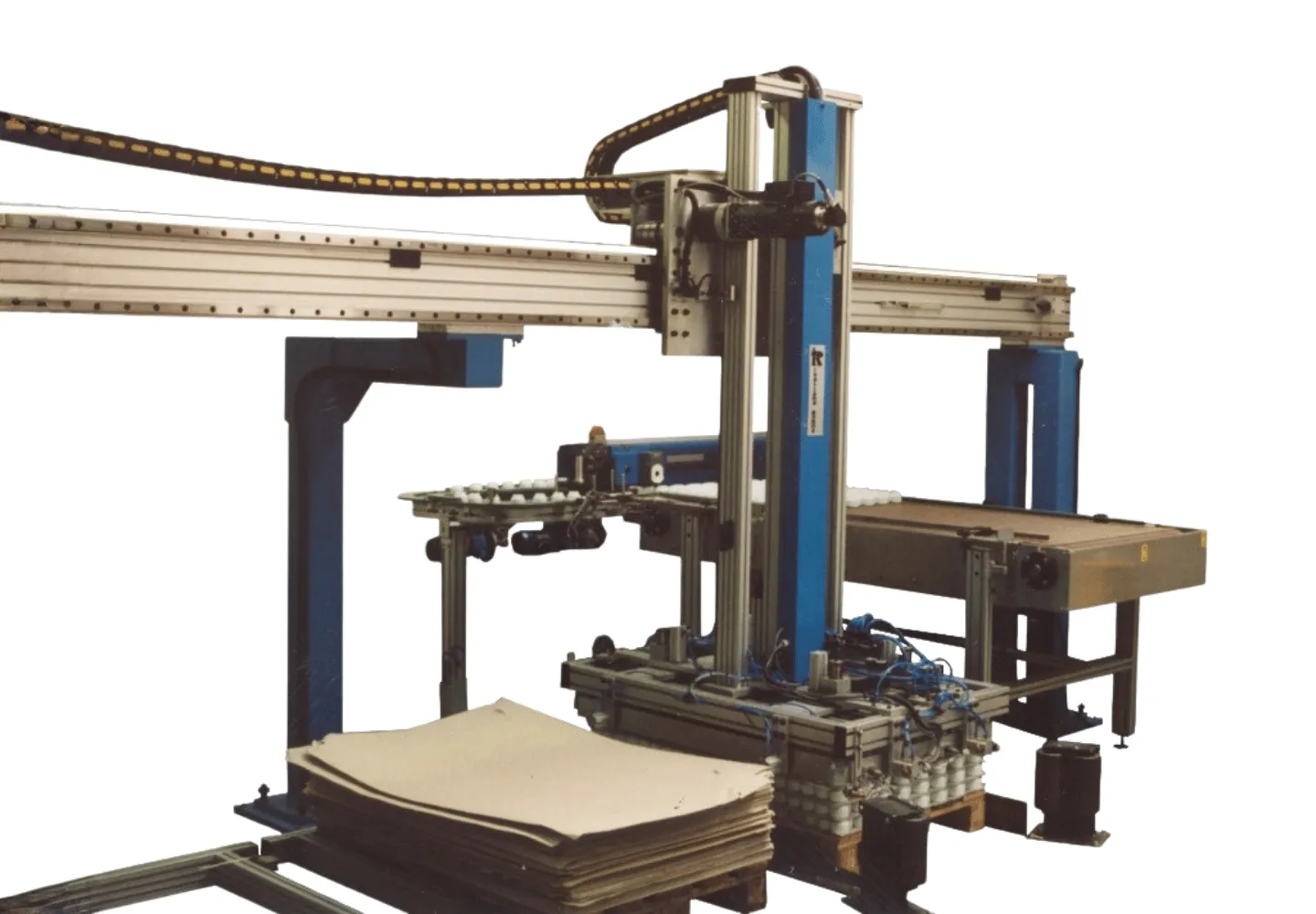
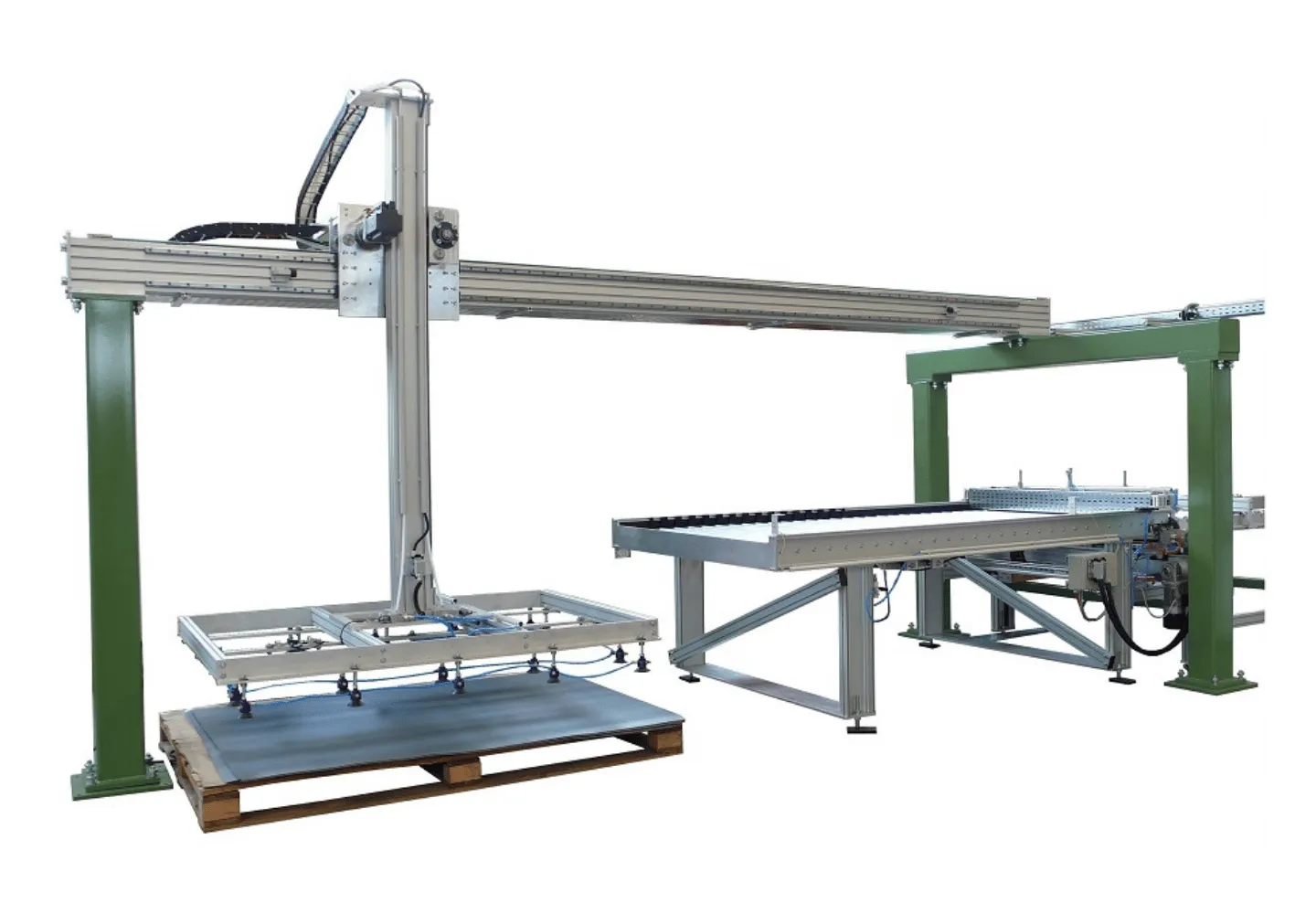
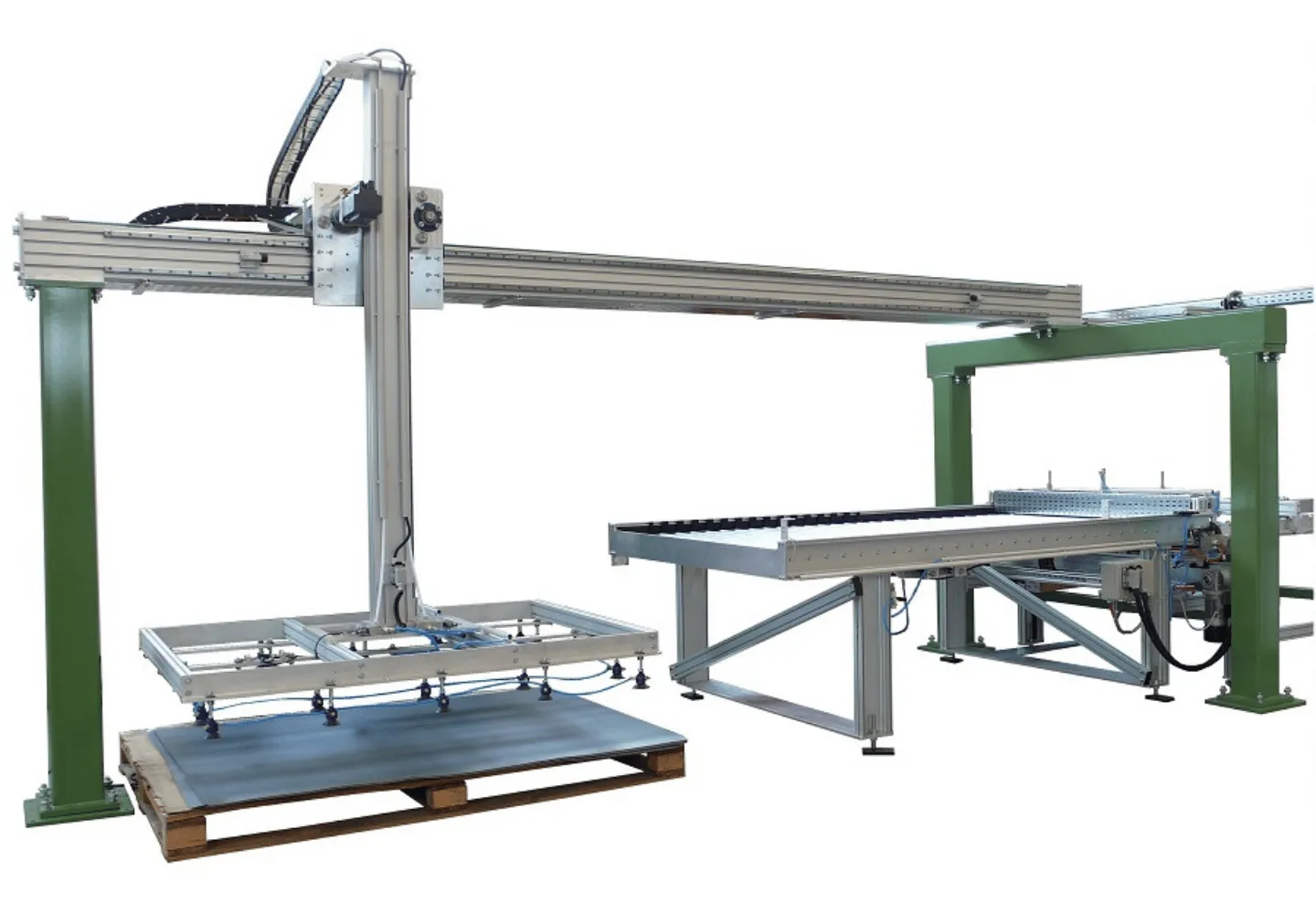
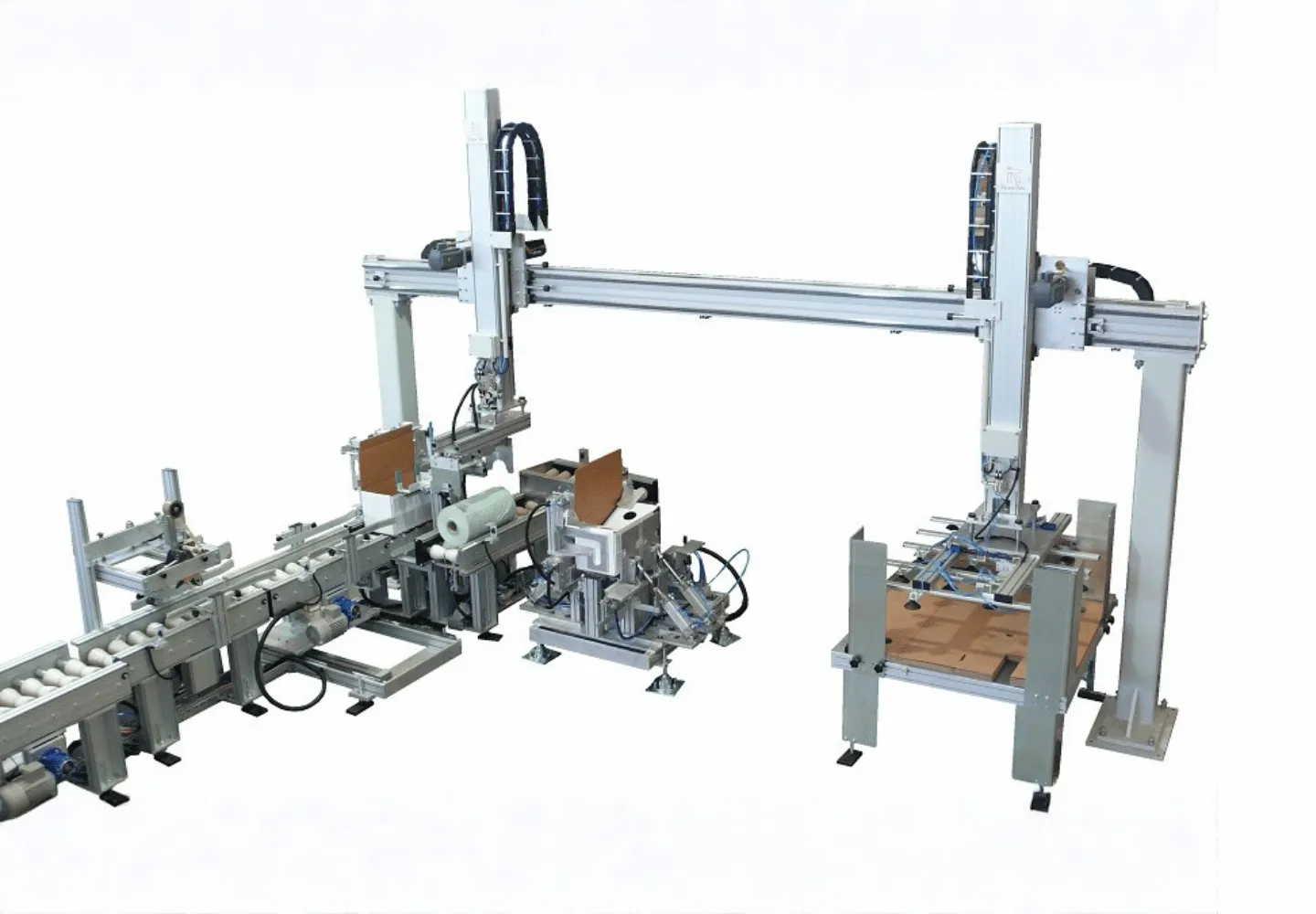
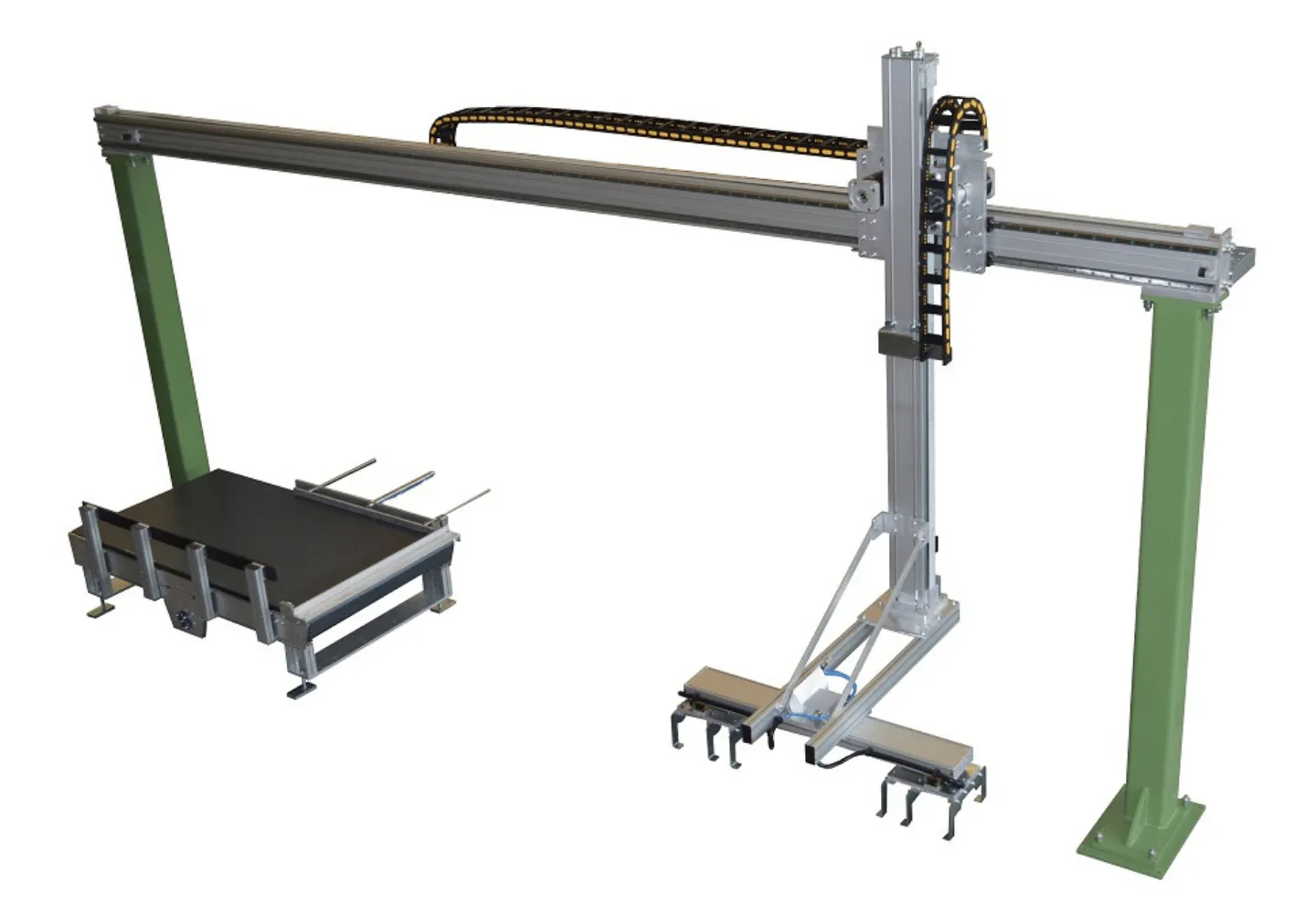
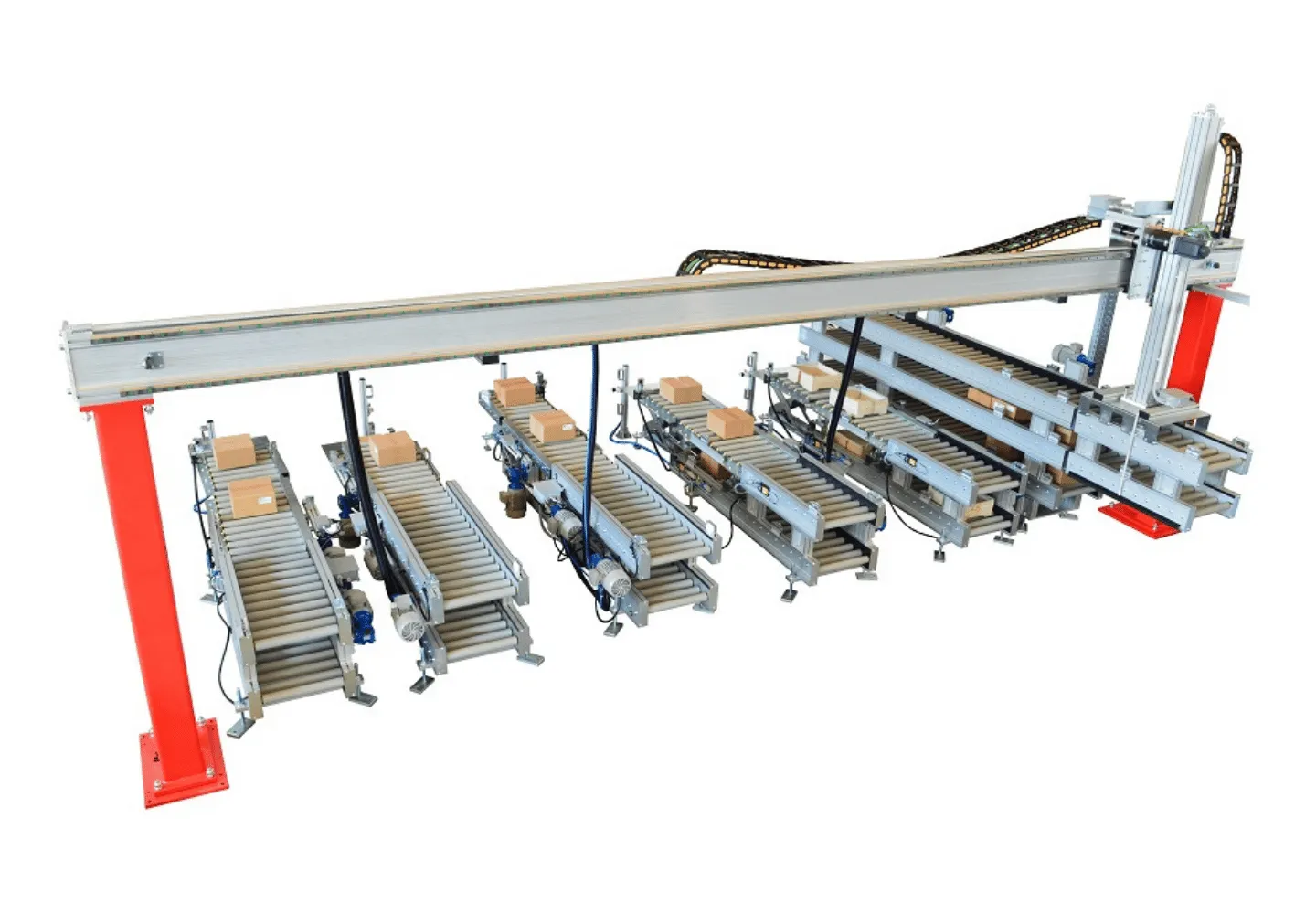
Portalroboter mittlerer bis großer Baugröße (Traglast von 50 kg bis 1000 kg am Handgelenk) mit zwei Achsen für horizontale und vertikale Bewegungen sowie der Möglichkeit, zusätzliche Achsen für die Drehung und/oder das Schwenken des Greifers hinzuzufügen.
Typischerweise wird er für Materialhandling und die Beschickung von Werkzeugmaschinen eingesetzt, kann jedoch auch für verschiedene andere Anwendungen verwendet werden.
Der Roboter kann mit mehreren Armen ausgestattet werden, und die Vertikalachse kann auch teleskopisch ausgeführt sein.